




為了確定數(shù)控加工中心的運動方向和移動距離,需要(yào)在機(jī)床上(shàng)建立一個坐標係,這就是數控加工中心坐標係。
數控(kòng)加工(gōng)中心坐標係是為了確定工件在機床上的(de)位置、機床運動部件的特殊位置(如換刀點、參考點)以及運動範(fàn)圍(wéi)(如行程範圍、保護區(qū))等而建立的幾何坐標係,是數控加工中心上固有的坐標係。
數控加(jiā)工中心的標準坐標係:右手笛卡兒(ér)直角坐標係。
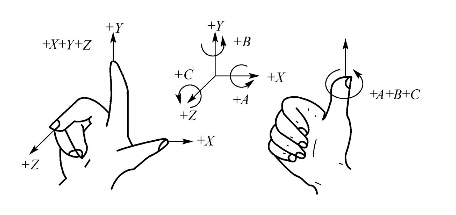
直線坐標 X Y Z
旋轉坐標 A B C
附(fù)加坐(zuò)標U V W
旋轉坐標 A B C
附(fù)加坐(zuò)標U V W
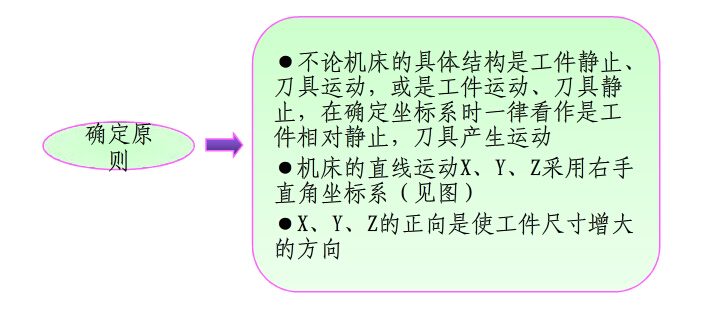
數控加工(gōng)中(zhōng)心相(xiàng)對運動的確定說明:
加工過程中不論是刀具移(yí)動還(hái)是工件移動,一律假定工件靜止不動,而刀具在移(yí)動,並規(guī)定刀具遠離工件(jiàn)的運動方向為(wéi)坐標軸的正方向。編程人員在不知道機床加工時是刀具(jù)移動還是工件移動的情況下,可(kě)以根據零件圖紙確定機床(chuáng)的加工工藝過程。
加工過程中不論是刀具移(yí)動還(hái)是工件移動,一律假定工件靜止不動,而刀具在移(yí)動,並規(guī)定刀具遠離工件(jiàn)的運動方向為(wéi)坐標軸的正方向。編程人員在不知道機床加工時是刀具(jù)移動還是工件移動的情況下,可(kě)以根據零件圖紙確定機床(chuáng)的加工工藝過程。
如果(guǒ)把刀具看作靜止不動,工件(jiàn)移動,那麽在坐標軸的字母上加“'”:加“'”字母(mǔ)表示的(de)工件運(yùn)動正方向與不加“'”,表(biǎo)示的刀具運動正方向相反+X=-X' +Y=-Y' +Z=-Z' +A=-A' +B=-B' +C=-C'
數控加工中心運動方向的規定:
正方(fāng)向的確定原則:刀具遠離工件的方向(xiàng)為各坐標軸的正方向,反之則為負方向。
一、坐標軸及其運動方向
數(shù)控加工中心坐標係的確定方法順序(xù):先確定(dìng)Z軸,再確定X軸,*後確定Y軸。
1) Z坐標:將平行於機床主軸(zhóu)的刀具(jù)運動坐標(biāo)定義為z坐標。
.所(suǒ)謂主軸是指產生切削動力的軸,例如銑床、鑽床、膛床上的刀具旋轉軸和車(chē)床上的工件旋轉(zhuǎn)軸。
.當(dāng)機床有幾個主軸時,選一個垂直工件裝卡麵的主軸為z軸.當機床沒有主軸時,選與裝卡工件的工作台麵相垂直的直線為(wéi)z軸.
.正方向:取刀具遠離工件(jiàn)的方向為正方向如立式銑床,主(zhǔ)軸箱的上、下或主(zhǔ)軸本身(shēn)的上、下即可定為z軸,且是向上為正;若主軸不(bú)能上下動作,則工(gōng)作台的上、下便為(wéi)z軸,此(cǐ)時工作台向下運動的方向定為正向。
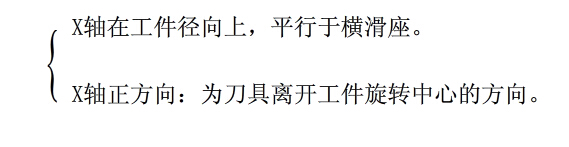
2)X軸:X軸為水平方向(xiàng)且垂直於Z軸並平行於工件裝麵。
①工件旋轉運動的機床
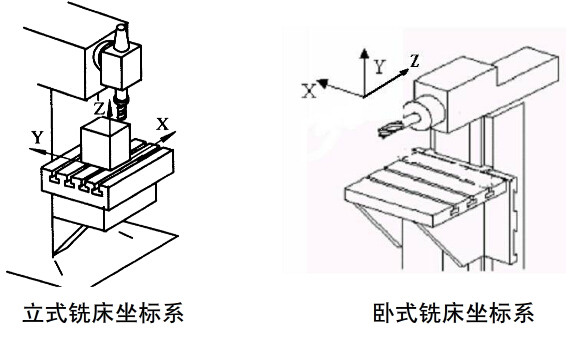
②刀具旋轉運動的加(jiā)工中心
②刀具旋轉運動的加(jiā)工中心
(3)Y軸(zhóu):Y軸與A Z垂直。當(dāng)X、Z軸確定後(hòu),按右手法則確定Y軸正方向。
4) A, B, C
坐標A, B, C坐標分別為繞X, Y, Z坐標的回轉進給運動坐標,確定X, Y, Z坐標(biāo)的正方(fāng)向後,可按(àn)右手螺(luó)旋定則來(lái)確定A, B, C坐標的正方(fāng)向。
5)附加運動坐(zuò)標X, Y, Z
為機床的主坐標係或稱第一坐標係;如除第一坐標係以外還有平行於(yú)主坐標係的其它坐標係則稱為附加坐標係。
附加的第二坐標係命名為U, V, W.
附加的第三坐標係(xì)命名為P,Q, R,
